| P-006 | Нижний предел рабочей частоты | 0Гц~Р-005. Нижнее предельное значение выходной частоты преобразователя, которое работает, когда заданная частота ниже, чем нижняя предельная частота. | 0 Гц |
| P-007 | Время ускорения | 0.1~3600с. Время ускорения относится к времени t1, требуемому для ускорения преобразователя частоты с 0 Гц до максимальной выходной частоты (P-004). Когда установленная частота равна максимальной частоте, фактическое время ускорения совпадает со временем ускорения. Когда установленная частота меньше максимальной частоты, фактическое время ускорения меньше установленного времени ускорения. | 10 с |
| P-008 | Время замедления | 0.1~3600с. Время замедления относится к времени t2, требуемому для того, чтобы преобразователь частоты замедлялся от максимальной выходной частоты до 0 Гц. Когда установленная частота равна максимальной частоте, фактическое время замедления совпадает со временем замедления. Когда установленная частота меньше максимальной частоты, фактическое время замедления меньше установленного времени замедления. | 10 с |
| P-009 | Частота настройки клавиатуры | 0.00Hz〜P-004. Когда в качестве «настройки клавиатуры» выбрано указание частоты, значение кода функции станет начальным значением цифрового набора частоты преобразователя частоты. | 50 Гц |
| P-010 | Варианты направления вращения | 0: Вращение в направлении по умолчанию. Вращение в фактическом направлении после включения частотного преобразователя. 1: Вращение в обратном направлении. Направление вращения электродвигателя может быть изменено путем изменения кода функции в случае, если не изменяются какие-либо другие параметры, и эффект эквивалентен изменению линии подключения электродвигателя (U, V, W). Примечание. После инициализации параметра направление вращения электродвигателя вернется в исходное состояние. Его следует использовать с осторожностью, если после отладки системы отклонение электродвигателя не может быть изменено. 2: Вращение в обратном направлении запрещено. Обратный ход преобразователя частоты не допускается, и он подходит для особого случая, когда обратный ход запрещен. | 0 |
| P-011 | Установка несущей частоты | 1~15 кГц. Эта функция в основном используется для устранения таких проблем, как шум электродвигателя и вмешательство преобразователя частоты во внешний мир и так далее. Преимущества использования высокой несущей частоты: более идеальная форма волны тока, меньше текущая гармоника, малый шум электродвигателя. Недостаток использования высокой несущей частоты: увеличение потерь при переключении, повышение температуры частотного преобразователя. Заводские настройки сделаны оптимально и пользователю нет необходимости их менять. | 8 кГц |
| P-012 | Восстановление параметров | 0: Нет операции. 1: Преобразователь частоты восстановит все параметры до заводских по умолчанию (кроме параметра электродвигателя). 2. Преобразователь частоты очистит все последние файлы ошибок. 3. Зарезервировано. 4: Преобразователь частоты восстановит все параметры до заводских настроек (включая параметры электродвигателя). После срабатывания всех выбранных функций этот код функции восстановится до 0 автоматически. | 0 |
| P-013 | Параметры самообучения | 0: Нет операции, то есть самообучение не допускается. 1: Параметр динамического самообучения. электродвигатель должен быть отключен от нагрузки, прежде чем устанавливать динамический параметр электродвигателя самообучения. Предварительно нужно ввести параметры паспортной таблички электродвигателя (P-029 — P-033), время ускорения и время замедления (P-007, P-008) должно быть установлено в соответствии с инерцией электродвигателя. Установите P-013 на 1 и нажмите клавишу DATA для входа в режим самообучения. Затем на дисплее будет мигать «-TUN-». Затем нажмите клавишу RUN, чтобы запустите параметр самообучения. На табло отображается «TUN0» … «TUN4» по порядку. Когда параметр самообучения будет завершен, появится «-END-». Когда мигает «-TUN-», кнопка PROG может быть нажата для выхода из режима самообучения параметра. В процессе самообучения параметров можно нажать кнопку остановки, чтобы остановить параметр самообучающейся операции. Примечание: запуск и остановка параметра самообучения могут контролироваться только с клавиатуры; после завершения параметров самообучения, код функции автоматически восстанавливается до 0. 2: Параметр статического самообучения. При статическом параметре электродвигателя нет необходимости отключать электродвигатель от нагрузки. Нужно ввести правильный параметр паспортной таблички электродвигателя (P-029 — P-033). Сопротивлением статора, сопротивлением ротора электродвигатель и утечка электродвигателя могут быть обнаружены после самообучения. Пока взаимная индуктивность электродвигателя и ток холостого хода не могут быть измерены и пользователь может ввести соответствующий код функции в соответствии с опытом. | 0 |
| P-014 | Выбор функции AVR | 0: Недействительно. 1: Действителен весь процесс. 2: Недействительно только во время замедления. 3: Автоадаптация. Функция AVR — это функция автоматической регулировки выходного напряжения. Когда функция AVR недействительна, выходное напряжение будет изменяться с изменением входного напряжения (или напряжения шины постоянного тока). Когда функция AVR действует, выходное напряжение не будет изменяется при изменении входного напряжения (или напряжения шины постоянного тока). Выходное напряжение будет оставаться постоянным в диапазоне выходной емкости по существу. Примечание. В процессе замедления при остановке функция автоматического регулирования напряжения AVR отключается за более короткое время замедления без перенапряжения. | 2 |
| P-015 | Режим запуска | 0: Прямой запуск: запуск с момента запуска преобразователя. 1: Торможение постоянным током перед запуском. электродвигатель запускает работу от торможения постоянным током затем запуск частоты. Подходит для случая, когда нагрузка с небольшой инерцией может привести к изменению при запуске. 2: Отслеживание скорости вращения перед запуском. Преобразователь частоты считает сначала скорость вращения и направление вращения электродвигателя, а затем скорость вращения до заданной частоты от текущей частоты для обеспечения плавного и безударного пуска электродвигателя, который подходит для перезапуска при отключении питания с большой инерцией. | 0 |
| P-016 | Частота прямого запуска | 0~10 Гц. | 0 |
| P-017 | Время удержания частоты запуска | 0~50 с. Частота прямого запуска — это частота запуска, которая устанавливает соответствующую частоту запуска и может увеличить крутящий момент при запуске. Во время удержания частоты запуска (P-017) выходная частота является начальной частотой, а затем она переходит от начальной частоты к целевой частоте. Если целевая частота (команда частоты) меньше начальной частоты, преобразователь частоты не будет работать в режиме готовности. Начальная частота не ограничена нижней предельной частотой. Начальная частота не работает в процессе прямого и обратного переключения. | 0 |
| P-018 | Ток торможения перед пуском | 0~150%. | 0 |
| P-019 | Время торможения перед пуском | 0~50 с. Торможение постоянным током может быть выполнено путем нажатия заданного тока торможения перед запуском при запуске преобразователя частоты, а затем ускоренное обслуживание будет запускаться через заданный ток торможения до времени торможения при запуске. Если время торможения установлено равным 0, то время торможения будет недействительным. Чем больше торможение постоянным током, тем больше тормоз. Ток торможения перед запуском относится к проценту от номинального тока относительно преобразователя частоты. | 0 |
| P-020 | Выбор режима остановки | 0: Замедлить. Преобразователь частоты понижает выходную частоту в соответствии с режимом замедления и определенное время ускорения / замедления после этого остановки Команда действительна. Преобразователь частоты остановится, когда частота снизится до 0. 1: Выключение. Преобразователь частоты остановит выход сразу после выключения. Команда действительна. Нагрузка отключается в соответствии с механической инерцией. | 0 |
| P-021 | Частота запуска тормоза | 0~Р-004. Частота запуска стояночного тормоза: в процессе замедления, когда достигается эта частота, начинается торможение постоянным током. | 0 |
| P-022 | Время ожидания тормоза | 0~50 с. Время ожидания стояночного тормоза: перед запуском торможения постоянным током преобразователь частоты блокирует выход, а затем запускает торможение постоянным током в течение времени задержки. Используется для предотвращения перегрузки по току, вызванной торможением постоянным током при запуске, когда скорость довольно высока. | 0 |
| P-023 | Ток тормоза | 0~150%. Ток стояночного тормоза постоянного тока: относится к применяемой величине торможения постоянным током. Чем больше ток, тем лучше торможение постоянным током. | 0 |
| P-024 | Время торможения | 0~50 с. Время торможения при парковке: длительность торможения при парковке. Если время равно 0, то торможение постоянным током будет недействительным. Преобразователь частоты останавливается в соответствии с установленным временем замедления. | 0 |
| P-025 | Мертвое время положительного и обратного вращения | 0~3600 с. Переходное время на выходе нулевой частоты при положительном и обратном вращении | 0 |
| P-026 | Выбор защиты срабатывания терминала при включении питания | Когда инструкция по работе является управлением клеммами, система автоматически обнаружит работающую клемму в процессе включения частотного преобразователя. 0: команда работы терминала недопустима при включении питания, то есть в процессе включения питания, она обнаруживает, что терминал действующей инструкции действителен, и устройство не будет работать. Система будет находиться в состоянии защиты во время выполнения до тех пор, пока не будет отменен терминал рабочих инструкций. Затем терминал активируется и преобразователь частоты будет работать. 1: команда работы терминала действительна при включении питания, то есть если терминал работающей команды обнаружен действительным в процессе включения питания, система автоматически начнет работу преобразователя частоты после завершения инициализации. Примечание. Пользователь должен тщательно выбрать функцию, которая может привести к серьезным последствиям. | 0 |
| P-027 | Выбор действия для частоты ниже, чем нижний предел | 0: Работа на нижней предельной частоте. 1: Стоп. 2: Работа с нулевой скоростью. | 0 |
| P-028 | Тип преобразователя частоты | 0: G Модель 1: P Модель 0: Подходит для нагрузки с постоянным крутящим моментом для заданных номинальных параметров 1: Подходит для нагрузки с переменным крутящим моментом (вентилятор, нагрузка насоса) для заданных номинальных параметров. Преобразователь частоты использует комбинированный способ G / P, то есть коэффициент мощности адаптивного электродвигателя (тип G), используемый для нагрузки с постоянным крутящим моментом, на один файл меньше, чем он используется для вентилятора, нагрузки насоса (тип P). | — |
| P-029 | Номинальная мощность электродвигателя | 0.4 〜900.0 кВт | — |
| P-030 | Номинальная частота электродвигателя | 0.01Гц〜P-004 | 50 Гц |
| P-031 | Номинальная скорость вращения электродвигателя | 0〜36000 | — |
| P-032 | Номинальное напряжение электродвигателя | 0〜460В | — |
| P-033 | Номинальный ток электродвигателя | 0.1〜2000.0A | — |
| P-034 | Сопротивление статора электродвигателя | 0.001〜65.535Q | — |
| P-035 | Сопротивление ротора электродвигателя | 0.001〜65.535Q | — |
| P-036 | Индуктивность статора / ротора электродвигателя | 0.1〜6553.5mH | — |
| P-037 | Взаимная индуктивность статора / ротора электродвигателя | 0.1〜6553.5mH | — |
| P-038 | Ток холостого хода электродвигателя | 0.01〜655.35A | — |
| P-039 | Коэффициент пропорциональности усиления контура скорости 1 | 0〜100 | 15 |
| P-040 | Интегральное время контура скорости 1 | 0.01〜10.00 с | 2 с |
| P-041 | Переключение частоты низких точек | 0 Гц〜P-044 | 5 Гц |
| P-042 | Коэффициент пропорциональности усиления контура скорости 2 | 0〜100 | 10 |
| P-043 | Интегральное время контура скорости 2 | 0.01〜10.00 с | 3 с |
| P-044 | Частота переключения высокой точки | P-041〜P-004 | 10 Гц |
| P-045 | Коэффициент компенсации скольжения VC | 50%〜200%. Коэффициент компенсации скольжения используется для регулировки частоты скольжения векторного управления и повышения точности управления скоростью системы. Соответствующая регулировка параметра может эффективно сдерживать статическое отклонение скорости. | 100% |
| P-046 | Установка верхнего предела крутящего момента | 0,0 ~ 200,0% (номинальный ток преобразователя частоты). | 150% |
| P-047 | Настройка кривой V / F | 0: Прямая линия V / F кривая/ 1: Понижающий крутящий момент V / F-кривая | 0 |
| P-048 | Компенсация крутящего момента | 0.1%〜30.0% | 0 |
| P-049 | Компенсация крутящего момента выключена | 0,0%〜50,0% Компенсация крутящего момента в основном применяется к частоте среза (P-049) или ниже. Компенсация крутящего момента может улучшить низкочастотную характеристику крутящего момента V / F. Крутящий момент может быть выбран в соответствии с соответствующим размером нагрузки, а большая нагрузка может увеличить компенсацию. Однако компенсация крутящего момента не должна превышать размер. Компенсация превышения крутящего момента приведет к чрезмерному возбуждению электродвигателя и перегреву, большому выходному току преобразователя частоты и снижению эффективности. Когда компенсация крутящего момента установлена на 0,0%, преобразователь частоты автоматически компенсирует крутящий момент. Компенсация крутящего момента вне частоты: при этой частоте действует компенсация крутящего момента. Пока он будет недействительным, если заданная частота будет превышена. | 0 |
| P-050 | V / F предел компенсации скольжения | 0,0%〜200,0% Этот заданный параметр можно использовать для компенсации изменений скорости электродвигателя, вызванных нагрузкой в регуляторе V / F, для улучшения механических свойств мощности электродвигателя, и значение должно соответствовать номинальной частоте скольжения электродвигателя. | 0 |
| P-051 | Энергосберегающая операция | 0: Не активна. 1: Автоматическая энергосберегающая операция. Когда электродвигатель работает с постоянной скоростью в процессе холостого хода или легкой нагрузки, преобразователь частоты будет регулировать выходное напряжение путем определения тока нагрузки для достижения цели автоматического энергосбережения. Эта функция особенно эффективна для вентиляторов и нагрузок насоса. | 0 |
| P-052 | Зарезервировано | | |
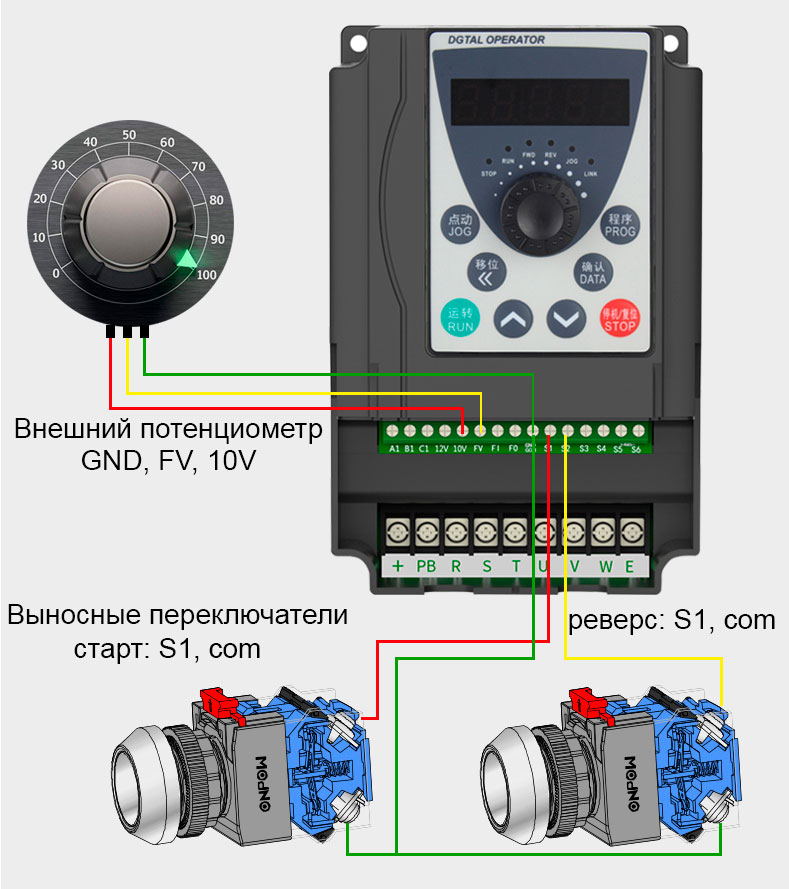
| P-053 | Выбор функции терминала S1 | 0~25 (описание ниже). | 1 |
| P-054 | Выбор функции терминала S2 | 0~25 (описание ниже). | 2 |
| P-055 | Выбор функции терминала S3 | 0~25 (описание ниже). | 8 |
| P-056 | Выбор функции терминала S4 | 0~25 (описание ниже). | 7 |
| P-057 | Выбор функции терминала S5 | 0~25 (описание ниже). | 4 |
| P-058 | Выбор функции терминала S6 | 0~25 (описание ниже). | 5 |